- Global Web Outlook Newsletter
- Posts
- 2025-04-11号
2025-04-11号
tk42
April 11, 2025
今週気になったニュース

米財務長官スコット・ベッセント氏が示した構想は、同盟国との貿易協定を基盤に、中国に対して集団で貿易構造の是正を求めるというものです。この背景には、米中貿易戦争の激化や、中国の国際貿易システムにおける不公正な慣行への批判があります。以下に詳細をまとめます。
背景
米中貿易戦争の激化
米国は中国に対する相互関税率を大幅に引き上げ、現在では84%に達しています。また、中国も報復措置として米国製品に34%の追加関税を課しており、両国間の対立が深刻化しています[1][5]。中国の通貨政策と批判
中国人民銀行が人民元の切り下げを続けていることが、通貨操作として批判されており、これが世界的な関税引き上げ競争につながる懸念があります[2][3]。EUの動向
EUは米国から距離を置き、中国との関係強化を進めています。特にスペインがその路線を支持していることが指摘されており、米国はこれを「自らの首を絞めるようなもの」と警告しています[7]。トランプ政権の関税政策
トランプ政権は幅広い関税政策を展開し、多くの国と地域に対して相互関税や普遍的関税を導入しています。この政策は、米国内製造業の保護やリショアリング(生産回帰)を促進する狙いがあります[4][8]。
今後の展望
同盟国との協力強化
米国は日本、韓国、インドなど主要同盟国と協議を進めており、これらの国々との連携が強化される可能性があります。同盟国間で統一的な貿易戦略を構築し、中国への集団的な交渉力を高める方向に進むでしょう[7][9]。中国との対立深化
中国は人民元切り下げや報復関税などで対抗しており、米中間の緊張はさらに高まる可能性があります。一方で、中国も交渉への意欲を示す可能性があり、双方が妥協点を模索する展開も考えられます[6][8]。EUと中国の関係強化
EU内では中国との経済的結びつきを強める動きが見られます。これにより、米EU間の経済的分断が進む可能性があります。ただし、EU内でも意見が分かれるため、この動向は流動的です[7][9]。世界貿易構造の変化
米中貿易戦争や各国間の新たな貿易協定によって、世界的なサプライチェーン再編や地域経済圏形成が加速するでしょう。特にアジア諸国ではフレンドショアリング(友好国への生産移転)が進む可能性があります[8][9]。
全体として、米中間の緊張が続く中で、各国は自国経済への影響を最小限に抑えるため、新たな連携や戦略的調整を模索する展開が予想されます。
Citations: [1] https://www.jetro.go.jp/biznews/2025/04/5332df2e36a1a042.html [2] https://ja.wikipedia.org/wiki/%E7%B1%B3%E4%B8%AD%E8%B2%BF%E6%98%93%E6%88%A6%E4%BA%89 [3] https://www.jetro.go.jp/biznews/2025/04/245c65ff5fb40949.html [4] https://zonos.com/ja/docs/guides/2025-us-tariff-changes [5] https://www3.nhk.or.jp/news/html/20250409/k10014774061000.html [6] https://www3.nhk.or.jp/news/html/20250410/k10014775121000.html [7] https://kabutan.jp/news/marketnews/?b=n202504100010 [8] https://www.dlri.co.jp/report/ld/431555.html [9] https://www.jetro.go.jp/biz/areareports/special/2024/0901/1d4d9e65ee93afe3.html [10] https://www.jetro.go.jp/biznews/2025/03/9f862ecc4ba1116b.html [11] https://www.youtube.com/watch?v=8ARgSmzHYWA [12] https://www.nikkei.com/article/DGXZQOGM100KJ0Q5A410C2000000/ [13] https://www3.nhk.or.jp/news/special/news_seminar/jiji/jiji6/ [14] https://www3.nhk.or.jp/news/html/20250409/k10014774931000.html [15] https://www.bbc.com/japanese/articles/ce8ggx0ekzko [16] https://www.rieti.go.jp/jp/publications/rd/134.html [17] https://jp.reuters.com/world/us/BXK34TG2KBIYDOQAMS3QBMESQI-2025-04-09/ [18] https://jp.reuters.com/world/us/IKX7RXALCVMJDK57MHDEHFCPCA-2025-04-09/ [19] https://www.fpu.ac.jp/rire/publication/column/d153158.html [20] https://jp.reuters.com/markets/commodities/MWUSBU2FMFOIBEZUKRCSNOTE4M-2025-04-08/ [21] https://news.yahoo.co.jp/articles/b7ab33330f9daa2391f1af931b00ecd2309a70b0 [22] https://www.bbc.com/japanese/articles/c8edjp2j6w5o [23] https://news.yahoo.co.jp/articles/628c0e1c4d32a489da6e10c42062799892614907?page=2 [24] https://www.youtube.com/watch?v=sshBsFnqYw4 [25] https://jp.reuters.com/world/us/7VJ3QVJDPJK23OKYORE5YTGPXA-2025-04-09/ [26] https://newsdig.tbs.co.jp/articles/withbloomberg/1844818 [27] https://shikiho.toyokeizai.net/news/0/870542 [28] https://jp.reuters.com/world/us/GVTKK4G4VNKWZH7OOSB26QCSDI-2025-04-09/ [29] https://www5.cao.go.jp/j-j/sekai_chouryuu/sa18-02/s2_18_1_1.html [30] https://www.jetro.go.jp/biznews/2025/04/e608616e0c460067.html [31] https://www.nri.com/content/900035149.pdf [32] https://www.jetro.go.jp/world/n_america/us/gtir/ [33] https://www.jetro.go.jp/biznews/2025/04/17d4665e00bf5ac9.html [34] https://www.jetro.go.jp/world/n_america/us/gtir/gtir2023.html

大会の背景と目的
この大会は、ロボット産業の発展を促進し、技術力を披露する場として企画されました。特に、二足歩行という高度な技術が求められる競技であり、参加企業にとっては自社の技術力をアピールする絶好の機会です[1][4]。また、人間ランナーと同じコースを走ることで、ロボットがどれだけ人間に近づけるかを測る実験的な意味合いも持っています[7]。
競技ルールと特徴
参加条件: 二足歩行が可能なロボットであること(車輪付きロボットは不可)。
自律性: 完全自律型から半自律型まで参加可能。事前プログラミングも認められています[1][2]。
制限時間: 3時間30分以内で完走する必要があり、平均秒速1.67メートル以上の速度が求められます[1]。
バッテリー交換とペナルティ: バッテリー交換は許可されていますが、ロボットの交代には10分間のペナルティが課されます[2][7]。
技術的課題
この競技では以下のような高度な能力が試されます:
移動速度と航続距離: ロボットによって性能差が大きく、一部モデルは秒速3.3メートルを達成していますが、多くの機体では安定した速度維持が課題です[1][5]。
バランス制御: 起伏や横風など屋外環境での安定性が重要です[1]。
バッテリー性能: 高負荷動作により稼働時間が短縮されるため、効率的なエネルギー管理が求められます[1][2]。
注目選手(ロボット)
Unitree Robotics: 中国企業で、H1モデルは秒速3.3メートルと高い性能を誇り、優勝候補とされています[5]。
Robot Era: 同じく中国企業で、「星動 STAR1」は秒速3.6メートルを達成し、強力なライバルとなっています[1]。
意義と展望
この大会は単なる競技イベントではなく、ロボティクスやAI分野における技術革新の促進や産業交流を目的としています。また、今後は陸上競技やサッカーなど他種目への展開も計画されており、このハーフマラソンはその第一歩となる重要な試みです[4][6]。
総じて、この大会は人型ロボットの能力向上だけでなく、人間社会との共存可能性を探る重要な一里塚と言えるでしょう。
Citations: [1] https://36kr.jp/336965/ [2] https://www.afpbb.com/articles/-/3569854?act=all [3] https://techshare.co.jp/product/unitree/unitree-h1/ [4] https://media.dglab.com/2025/03/06-toho-01/ [5] https://note.com/tipnews/n/n5cf54a806ea6 [6] https://note.com/gabc/n/n956fe070bd84 [7] http://j.people.com.cn/n3/2025/0305/c94475-20285114.html [8] https://news.yahoo.co.jp/articles/937b8f09deeceaa0838fddaf41e0f4806e6e2167 [9] https://www.nikkei.com/article/DGXZQOSG011QA0R00C25A4000000/ [10] https://spc.jst.go.jp/news/250302/topic_1_05.html [11] https://36kr.jp/277619/ [12] https://techshare.co.jp/unitree-h1-press-release/ [13] https://japanese.beijing.gov.cn/whatson/events/sports/202503/t20250312_4032958.html [14] https://xtech.nikkei.com/atcl/nxt/news/24/00779/ [15] http://www.livejapan.cn/static/content/rzfh/japanese_news/cns_news/2025-03-27/1352678322370789376.html [16] https://gadget.phileweb.com/post-72286/ [17] http://japanese.china.org.cn/business/txt/2025-04/08/content_117811853.htm [18] https://xtech.nikkei.com/atcl/nxt/news/18/16427/ [19] https://www.recordchina.co.jp/b951311-s12-c30-d0189.html [20] https://robozaps.com/unitree-g1%E3%81%AE%E3%83%AC%E3%83%93%E3%83%A5%E3%83%BC%EF%BC%9A%E3%83%92%E3%83%A5%E3%83%BC%E3%83%9E%E3%83%8E%E3%82%A4%E3%83%89%E3%83%AD%E3%83%9C%E3%83%83%E3%83%88/

背景とまとめ
ZeroZero Robotics社の挑戦的な設計
従来のドローン市場では、4つのプロペラを持つ「クアッドコプター」が安定性や操作性の面で主流でした。しかし、ZeroZero Robotics社はその常識を覆し、2025年に「Falcon Mini」というV字型バイコプターを発表しました。この機体は、プロペラを2つしか持たないという大胆な設計を採用しながらも、安定した飛行性能と高品質な映像撮影を実現しています[1][2][7]。
技術的背景
V字型デザインと可変チルト機構
Falcon Miniは2つのプロペラをV字に配置し、AI制御と可変チルト機構を組み合わせています。この技術により、従来のクアッドコプターと同等以上の飛行制御が可能となり、抜群の安定性を誇ります。例えば、飛行中にコインを乗せても落ちないほどの精密な制御が実現されています[1][2]。超軽量・コンパクト設計
Falcon Miniは249gという軽量化を達成し、折りたたみ式構造によってスマートフォンサイズに収まるコンパクトさも特徴です。この設計は持ち運びや収納の利便性を大幅に向上させています[2][7]。静音性と長時間飛行
動作音は62デシベルと低く抑えられ、充電48分で34分間の飛行が可能です。これにより静かな環境での撮影や長時間の撮影にも対応できる点が映像制作者から高く評価されています[2][7]。
市場への影響
Falcon Miniは2025年3月にクラウドファンディングサイト「Indiegogo」で発表されるやいなや目標金額を超え、多くのドローン愛好家や映像制作者から注目を集めました。この成功は従来技術の枠を超えた革新性が評価された結果と言えます[2][3]。
ZeroZero Robotics社の歴史
ZeroZero Robotics社はこれまでにもユニークな製品を開発してきた中国のスタートアップ企業です。同社は「Hover Camera」シリーズで注目されており、自撮り用途やコンパクト設計に特化した製品で成功を収めていました。今回のFalcon Miniもその延長線上にある革新的な製品です[5][6]。
まとめ
Falcon Miniは従来型ドローンが抱える課題(構造の複雑さ、大型化による不便さ、動作音など)を克服する新しい設計思想によって生まれました。AI技術と独自のチルトローター制御システムがその成功を支えています。この製品はドローン市場に新たな選択肢を提供するとともに、未来のドローン設計への道筋を示しています[1][2][7]。
Citations: [1] https://www.drone.jp/news/20250306163848112987.html [2] https://news.nicovideo.jp/watch/nw17482259 [3] https://news.nifty.com/article/item/neta/12363-3998149/ [4] https://www.cined.com/jp/vcoptr-falcon-worlds-vshaped-bicopter/ [5] https://drone-under500.com/drone/aerial-photography/post-4700/ [6] https://www.drone.jp/news/2019122019351031187.html [7] https://nazology.kusuguru.co.jp/archives/174794 [8] https://www.drone.jp/news/20250306093322112222.html [9] https://nazology.kusuguru.co.jp/archives/author/okura [10] https://ascii.jp/archive/top/202207/ [11] https://www.drone.jp/news/20250306171139112996.html [12] https://sga.aui.ma/destress-week/ [13] https://b.hatena.ne.jp/entry/s/nazology.kusuguru.co.jp/archives/174794 [14] https://www.youtube.com/watch?v=a-Wb41lCU5Q [15] https://www.f-rei.go.jp/assets/contents/investigative%20report_0719_02.pdf [16] https://b.hatena.ne.jp/entry/s/nazology.kusuguru.co.jp/archives/174794/2 [17] https://www.nedo.go.jp/content/100969381.pdf
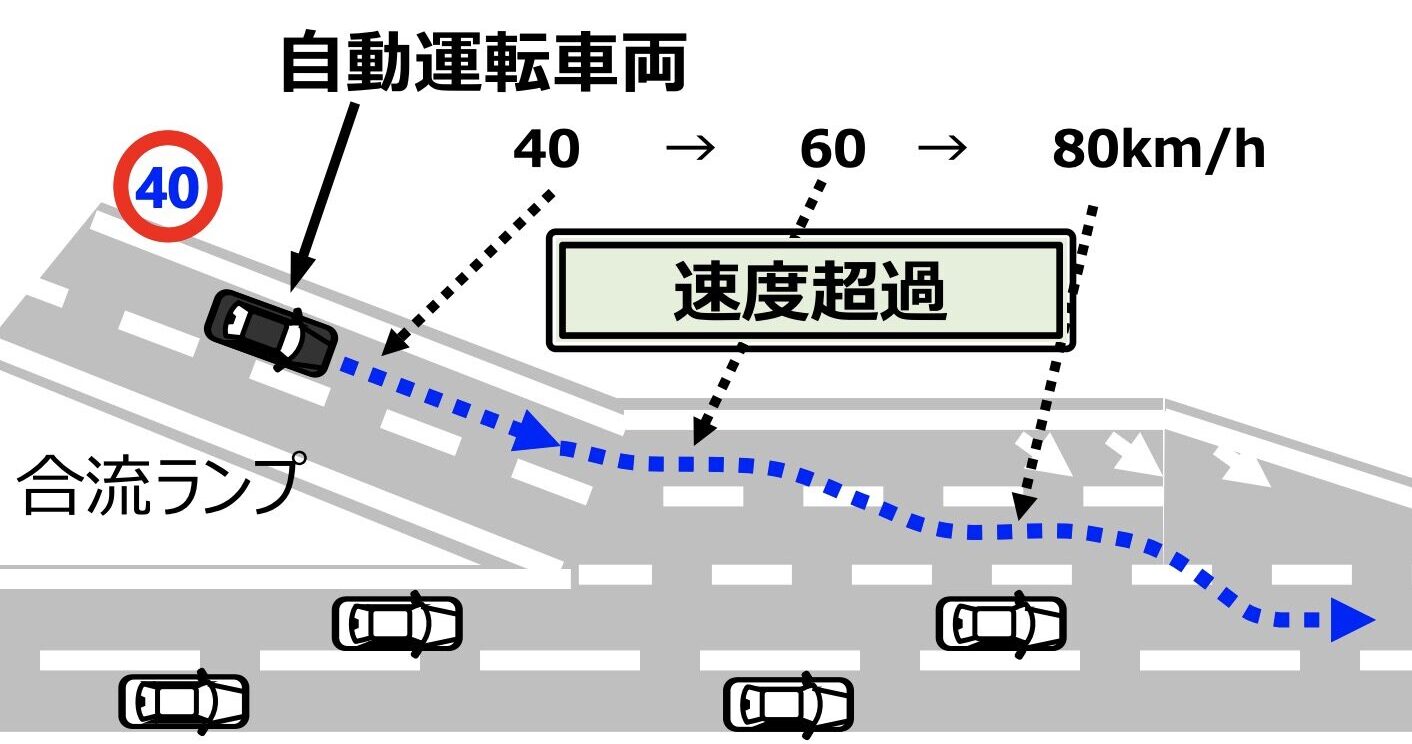
背景とまとめ:自動運転車の速度超過容認議論
背景
警察庁所管の検討委員会で、自動運転車が一定条件下で速度超過を容認する可能性について議論が進められています。この議論の背景には、道路交通法を厳守する自動運転車が、実勢速度(実際に道路上で流れている速度)との乖離によって安全性を損なう可能性があるという問題があります[1][2][3]。
特に首都高速道路や名古屋高速などでは、以下のような課題が指摘されています:
高速道路合流時: 合流ランプの加速車線区間が短い場合、一般車両は制限速度を超えて本線に合流することが一般的ですが、自動運転車は交通ルールを厳守するため速度差が生じ、追突事故や渋滞を誘発するリスクがあります[1][2][3]。
右側出口への移動: 右側追越し車線に設けられた出口では、一般車両が制限速度を超えて走行している場合、自動運転車は車線変更や出口への移動が困難となり、事故リスクが増加します[1][2]。
これらの課題は、自動運転車が規制速度を厳守することで逆に交通全体の安全性を損なう可能性を示唆しています。
議論のポイント
速度超過容認の是非:
一部では、合理的な範囲での速度超過を許容するべきだという意見があります。例えば、高速道路合流時に安全性確保のため速度超過が必要になる場合があります[1][3]。
他方で、速度超過を認めた場合、事故発生時の責任問題や法的整備の複雑化が懸念されています[1][3]。
規制速度と実勢速度の乖離:
規制速度そのものを見直し、実勢速度に近づけることで問題解決を図るべきだという意見があります。これにより自動運転車と一般車両間の速度差を縮小し、安全性向上が期待されます[2][4]。
インフラ整備と周知:
路車協調インフラ(V2X技術)の活用や標識整備による注意喚起など、技術的・制度的な対応策も提案されています[2][3]。
自動運転車の挙動への理解促進も重要視されており、周囲のドライバーへの周知活動が求められています[1][3]。
まとめ
自動運転車が規制速度を厳守することで発生する安全性リスクへの対処として、以下の方向性が議論されています:
交通ルールそのものの柔軟な解釈や見直し。
実勢速度との乖離を縮小するため規制速度の再設定。
技術的インフラ整備による安全性向上。
周囲ドライバーへの理解促進と協力体制構築。
これらは、自動運転社会実装に向けた重要な課題であり、安全性向上と交通全体最適化の両立が求められています。議論は今後も続く見込みです。
Citations: [1] https://jidounten-lab.com/u_53641 [2] https://www.npa.go.jp/bureau/traffic/council/r6_1_04_shiryo2.pdf [3] https://jidounten-lab.com/u_53756 [4] https://niben.jp/niben/books/frontier/frontier201711/2017_NO11_40.pdf [5] https://gazoo.com/column/daily/17/09/11/ [6] https://www.npa.go.jp/bureau/traffic/council/r6_2_06_gijigaiyo.pdf [7] https://www.nikkoken.or.jp/pdf/publication/2023j/2023j-p036.pdf [8] https://www.express-highway.or.jp/Portals/0/images/company/document/study/H30_Automatic_Drive_Report_Final.pdf [9] https://x.com/iloha_train/status/1862119744129896764 [10] https://www.digital.go.jp/assets/contents/node/basic_page/field_ref_resources/1fd724f2-4206-4998-a4c0-60395fd0fa95/eff95b08/20240523_meeting_mobility-subworking-group_minutes_01.pdf [11] https://www.sip-adus.go.jp/rd/rddata/rd04/101.pdf [12] https://www.npa.go.jp/bureau/traffic/council/r6_3_05_shiryo3.pdf [13] https://www.npa.go.jp/bureau/traffic/council/r6_tyosakenkyuhoukokusyo.pdf [14] https://xtech.nikkei.com/atcl/nxt/mag/at/18/00012/00094/?P=3 [15] https://www.risk-megane.com/property_loss_risk/7064/ [16] https://www.classnk.com/hp/pdf/research/rd/2021/04_j01.pdf [17] https://www.takatafound.or.jp/library/files/00534.pdf [18] https://www.mlit.go.jp/road/ir/ir-council/jisedai_its/pdf01/03.pdf [19] https://shakosv.sk.tsukuba.ac.jp/Labo/ayakolab/pdf/research_theme/3-4-(2)-198.pdf [20] https://www.takatafound.or.jp/library/files/00521.pdf